~/picar-x/example $ sudo python3 4.avoiding_obstacles.py
distance: -1
distance: -1
distance: -1
distance: -1
It always wend backward
px.set_dir_servo_angle(-30)
px.backward(POWER)
time.sleep(0.5)
distance: -1
It is very likely that the ultrasonic sensor was connected incorrectly.
Could you please double-check the connections?
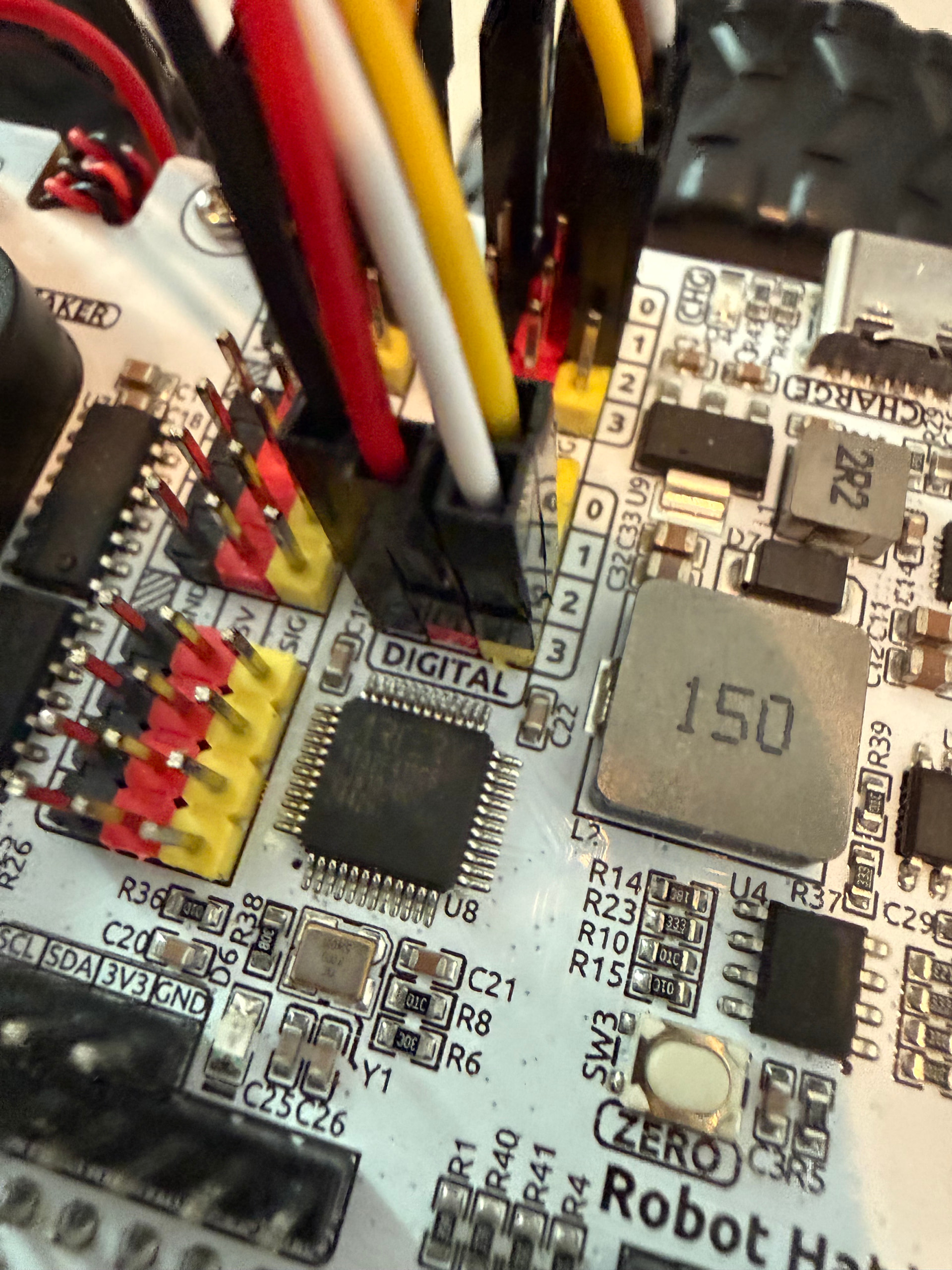
Black wire — GND
Red wire — 3V3
White wire — D3
Yellow wire — D2
After confirming the wiring is correct, please run the example code again to see how it works.
Obstacle Avoidance wire has no issue as enclosed picture
Black wire — GND
Red wire — 3V3
White wire — D3
Yellow wire — D2
same return -1 result, please assist to resolve the issue
cd ~/picar-x/example
sudo python3 4.avoiding_obstacles.py
distance: -1
distance: -1
distance: -1
distance: -1
distance: -1
with the same connection, I changed to another Obstacle Avoidance device bought from outside, and it worked.
:02:35 2025 from 192.168.1.13
kienchen@raspberrypi:~ $ cd ~/picar-x/example
sudo python3 4.avoiding_obstacles.py
distance: -2
distance: 117.24
distance: 116.75
distance: 116.75
distance: 116.43
distance: 116.3
distance: 116.39
Please contact service@sunfounder.com to provide your detailed address to get a replacement ultrasonic module.