I just received the GalaxyRVR kit for Christmas. I’m going through the lessons and everything has been fine through Lesson 8. I have started Lesson 9 and made it to the part where you have the rover move and show different colors for different movements. As soon as I start running the 9_rgb_car_move program it performs the forward movement, but then stops when it is supposed to start the backward movement, and won’t do anything else. I plugged it back in and charge it up, tried it again and it does the same thing.
I stepped back to Lesson 8, charged up the battery and reloaded the 8_ultrasonic_ir_avoid sketch and it ran fine, for a couple of minutes around the house at least.
I tried re-writing the sketches for Lesson 9. The sketches for 9_set_color and 9_set_color_offset worked fine. Then I rewrote the sketch for 9_rgb_car_move. I wrote out the whole sketch, then went through and commented out the commands to make the wheels rotate, leaving on the parts where it changes the colors based on the movement it was making. This all worked as expected. I went back into the code and removed the comments from the wheel rotation lines and tried again. Again, the rover moved forward with a green light, then stopped and shut down, NO POWER again. I charged it up again, and again the same thing.
What gives? Have I broken this already?
More info:
When I plug the USB cable into the Rover, the wheels spin for forward movement, the LEDs light up green. This lasts for about 2 seconds, there’s a brief pause, then it does it again, over and over (loop?). However, it never goes to the next steps, moveBackward, turnLeft, turnRight, stopMove, and the lights never change color. When I unplug the blue USB cable everything stops. No power, nothing.
I plug in the black, usb-c cable. A red LED by the plug and two amber LEDs by the power switch come on. After a short while (a minute or two) the red light turns off. I assume this means the batter has stopped charging. Unplugging the usb-c cable and turning on the power switch the Rover does the same thing, runs forward for 2 seconds, the dies.
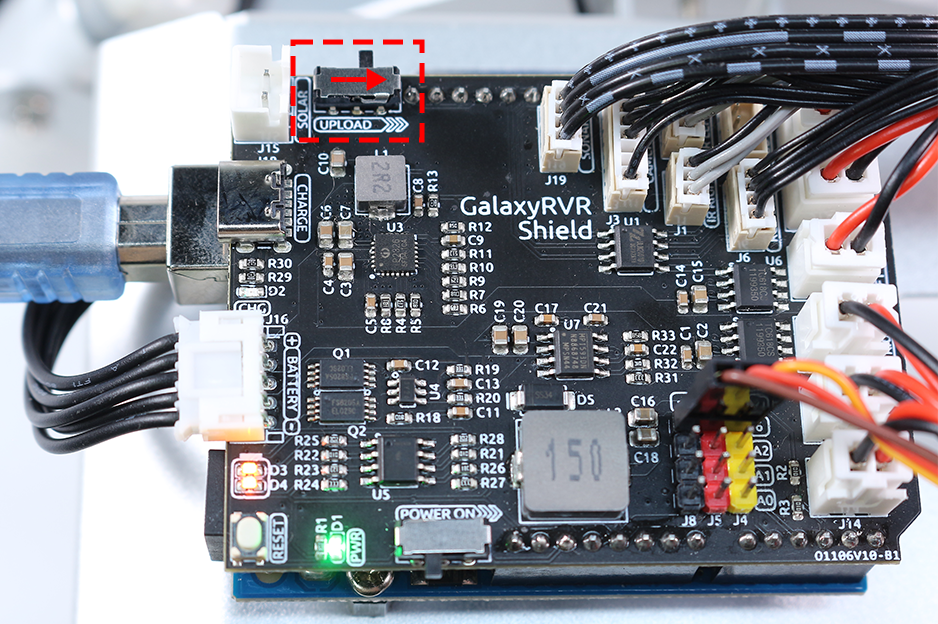
Also, What is the function of the “Upload” switch. I’m guessing it is a way to plug in the blue USB cable and allow you to communicate with the arduino board without it actually running. This is not the behaviour I get though. When I plug the blue USB cable, if there is code for the wheels to turn, they start turning, so I end up having to hold the Rover up off any surface while I’m trying to plug in the cable, upload code, then unplug the cable. What is the purpose of the “UPLOAD” switch? All the instructions / lessons say is if you have already fully assembled the Rover to move this switch to upload while uploading code. Are you supposed to move it the other way to actually put the rover into action? More information in the instructions / lessons would be helpful for us Noobs.

{kind=link}