Hello,
I have an old PiCrawler, the one with Bluetooth, connected to a RaspberryPi 3B+.
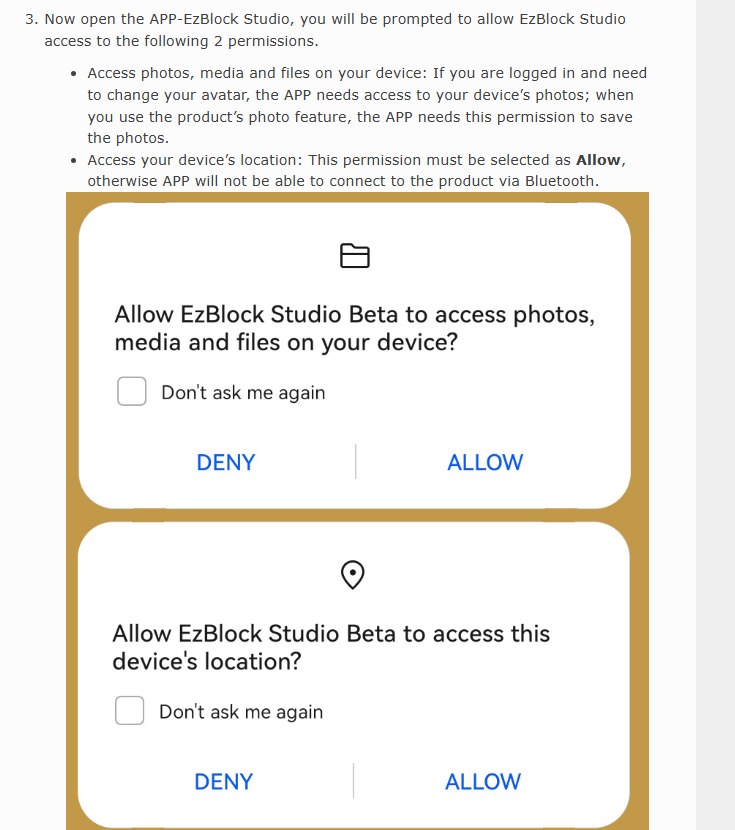
I downloaded the OS provided on EzBlock, followed all the instructions from here
When I start the PiCrawler, there is no sound. I ran the i2samp.sh as instructed and there is no sound, but it identifies “speakers”, at least as output from the script. The sound did not play at all, neither at first boot, neither after all installs.
I thought it’s odd, but thought it’s because it uses Debian Buster, and RPi 3B+.
I went on doing the servo adjust, and that does not work either. I tried searching for instructions on how to use the USR and RST button but cannot find them.
Am I missing something? The RobotHat is connected to the RPi, and the power is connected to the RPi, not through the battery. I have not connected the camera and the ultra sound sensors to the RobotHat yet.
I reinstalled the OS, and installed the v2.0 of robot hat and picrawler. I ran i2samp.sh, and stil no sound. I tried running the example, and all I get is a python error:
picrawler@picrawler:~/picrawler/examples $ sudo python3 servo_zeroing.py
channel= 11
channel= <robot_hat.pwm.PWM object at 0x765f8ad0>
Traceback (most recent call last):
File "servo_zeroing.py", line 8, in <module>
zeroing_pin = Servo(PWM(11))
File "/usr/local/lib/python3.7/dist-packages/robot_hat-2.1.0-py3.7.egg/robot_hat/servo.py", line 20, in __init__
super().__init__(channel, *args, **kwargs)
File "/usr/local/lib/python3.7/dist-packages/robot_hat-2.1.0-py3.7.egg/robot_hat/pwm.py", line 44, in __init__
self.timer = int(channel/4)
TypeError: unsupported operand type(s) for /: 'PWM' and 'int'
I already tried killing pulseaudio, with no luck.
picrawler@picrawler:~/picrawler $ sudo killall pulseaudio
pulseaudio: no process found
System information:
Linux picrawler 5.10.103-v7+ #1529 SMP Tue Mar 8 12:21:37 GMT 2022 armv7l GNU/Linux
Please help me out, I’m stuck, and don’t know what else to try.
Thank you kindly